Schrittmotor ruckelt bei niedriger Drehzahl? Ursachen, Resonanzen und Lösungen
Schrittmotoren werden überall dort eingesetzt, wo Bewegungen präzise, reproduzierbar und wirtschaftlich umgesetzt werden sollen. Besonders in der Automatisierungstechnik, Medizintechnik, Dosiertechnik und Ventilsteuerung kommen häufig langsame und kontrollierte Bewegungen zum Einsatz.
Genau in diesem Betriebsbereich beobachten viele Entwickler jedoch ein typisches Problem: Der Schrittmotor läuft bei niedriger Drehzahl nicht gleichmäßig, sondern ruckelt, vibriert oder bewegt sich stoßweise.
Die Ursache liegt selten nur im Motor selbst. In den meisten Fällen entsteht das Problem durch das Zusammenspiel aus Motor, Stromregelung, Versorgungsspannung, Mechanik, Lastträgheit und Bewegungsprofil.
Warum Schrittmotoren bei langsamer Bewegung ruckeln
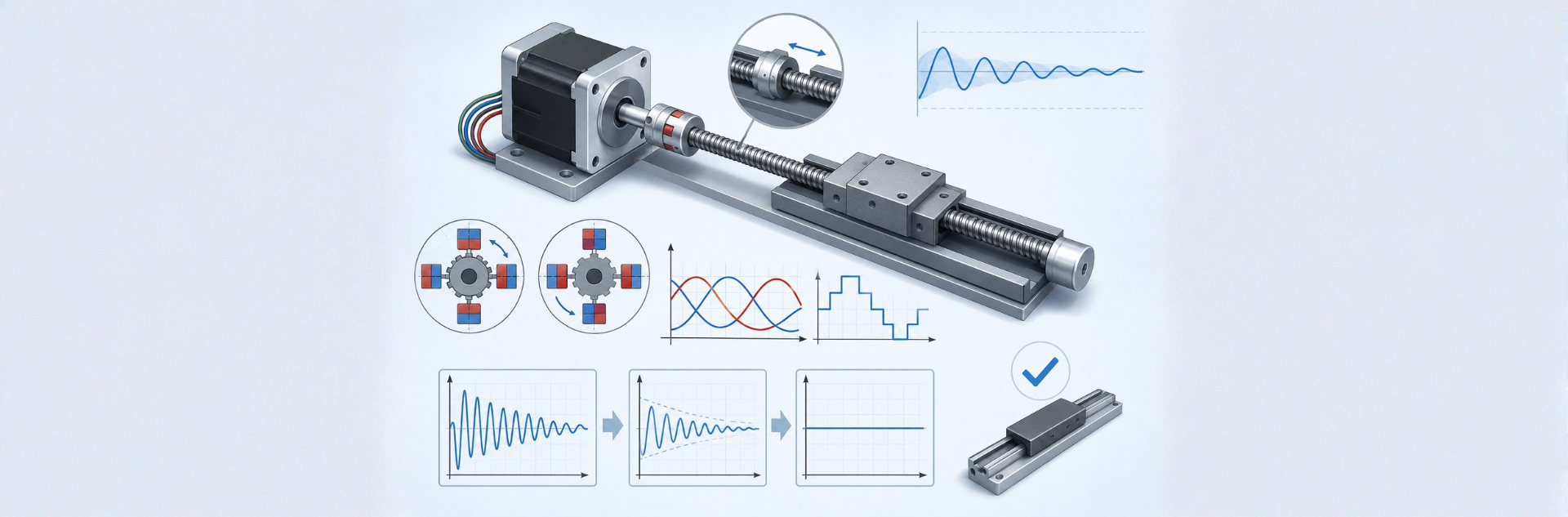
Ein Schrittmotor arbeitet nicht kontinuierlich wie ein Servomotor oder ein BLDC Motor. Die Bewegung erfolgt in einzelnen Schritten. Der Rotor springt magnetisch von einer stabilen Position zur nächsten.
Bei hohen Drehzahlen verschmelzen diese Einzelbewegungen durch die Massenträgheit zu einer scheinbar gleichmäßigen Rotation. Bei niedriger Drehzahl werden die einzelnen Bewegungsimpulse dagegen sichtbar und hörbar.
| Schrittwinkel | Schritte pro Umdrehung | Typische Eigenschaft |
|---|---|---|
| 1,8° | 200 | robuste Standardlösung |
| 0,9° | 400 | feinere Auflösung und ruhigerer Lauf |
Zusammenhang zwischen Schrittfrequenz und Drehzahl
Die Drehzahl ergibt sich aus der Schrittfrequenz und der Anzahl der Schritte pro Umdrehung.
| Variable | Bedeutung | Einheit |
|---|---|---|
| n | Drehzahl | U/min |
| f | Schrittfrequenz | Hz |
| N | Schritte pro Umdrehung | - |
Ein 1,8° Schrittmotor besitzt beispielsweise 200 Schritte pro Umdrehung. Bei einer Schrittfrequenz von 50 Hz ergibt sich:
Genau in diesem niedrigen Drehzahlbereich treten Resonanzen und sichtbare Bewegungsimpulse besonders häufig auf.
Warum Linearaktuatoren besonders empfindlich reagieren
Bei Linearaktuatoren und Spindelantrieben wird die Drehbewegung direkt in eine translatorische Bewegung umgesetzt. Dadurch werden selbst kleine Winkelschwankungen sichtbar.
Die lineare Bewegung pro Vollschritt ergibt sich aus:
| Variable | Bedeutung | Einheit |
|---|---|---|
| s | linearer Weg pro Schritt | mm |
| P | Gewindesteigung | mm |
| N | Schritte pro Umdrehung | - |
Bei einer Gewindesteigung von 0,5 mm und einem 0,9° Schrittmotor mit 400 Schritten pro Umdrehung ergibt sich:
Das entspricht 1,25 µm pro Vollschritt. Trotz dieser feinen theoretischen Auflösung können sichtbare Bewegungsfehler entstehen, wenn Resonanzen auftreten oder die Mechanik Spiel besitzt.
Weitere Informationen zu passenden Antriebslösungen finden Sie auf der Seite Linearaktuatoren.
Typische Ursachen für ruckelnde Schrittmotoren
Vollschrittbetrieb
Im Vollschrittbetrieb springt der Rotor direkt von einer magnetischen Hauptposition zur nächsten. Dadurch entstehen hohe Drehmomentsprünge und starke Schwingungsanregungen.
| Betriebsart | Laufruhe | Resonanzverhalten |
|---|---|---|
| Vollschritt | gering | kritisch |
| Halbschritt | mittel | besser |
| Microstepping | hoch | deutlich ruhiger |
Mehr dazu im Fachartikel Schrittmotor Betriebsarten erklärt .
Resonanzen bei niedriger Drehzahl
Jedes Motor Last System besitzt Eigenfrequenzen. Wird der Motor in der Nähe dieser Frequenzen betrieben, können sich Schwingungen massiv verstärken.
Besonders kritisch sind:
- kleine Lasten
- lange Spindeln
- elastische Kupplungen
- mechanisches Spiel
- steife Konstruktionen
Mehr zum physikalischen Hintergrund beschreibt der Fachartikel Resonanzfrequenz bei Schrittmotoren verstehen .
Schlechte Stromregelung
Die Stromregelung beeinflusst die Laufruhe massiv. Unscharfe Stromformen oder ungeeignete Endstufen erzeugen unruhige Magnetfelder und harte Bewegungsübergänge.
Zu niedrige Versorgungsspannung
Die Wicklungsinduktivität begrenzt den Stromanstieg in der Motorwicklung. Eine zu niedrige Versorgungsspannung verschlechtert deshalb das Drehmomentverhalten.
Weitere Informationen: Schrittmotor Versorgungsspannung richtig wählen .
Wie sich Ruckeln reduzieren lässt
| Maßnahme | Wirkung |
|---|---|
| Microstepping verwenden | ruhigerer Lauf |
| Rampen optimieren | weichere Bewegungen |
| Versorgungsspannung erhöhen | besserer Stromaufbau |
| Mechanik versteifen | weniger Spiel |
| Resonanzbereiche vermeiden | weniger Schwingungen |
Warum Steuerung und Software entscheidend sind
Gerade langsame Bewegungen erfordern saubere Rampenprofile, stabile Stromregelung und eine passende Parametrierung.
Mit der SmartStep Steuerung und der PSC2 Software lassen sich Bewegungsprofile, Rampen und Positionierabläufe parametrieren und testen.
FAQ zu ruckelnden Schrittmotoren
Warum ruckelt ein Schrittmotor bei niedriger Drehzahl?
Weil der Rotor schrittweise zwischen magnetischen Gleichgewichtspunkten bewegt wird und dabei Resonanzen entstehen können.
Hilft Microstepping gegen Ruckeln?
Ja. Microstepping reduziert Drehmomentsprünge und verbessert die Laufruhe deutlich.
Warum tritt das Problem bei Spindelantrieben stärker auf?
Weil kleine Winkelbewegungen direkt in sichtbare lineare Bewegungen umgesetzt werden.
Ist ein stärkerer Motor automatisch ruhiger?
Nein. Ein größerer Motor kann Resonanzen sogar verstärken, wenn Mechanik und Steuerung nicht passen.
Fazit
Das Ruckeln eines Schrittmotors bei langsamer Bewegung ist meist keine Fehlfunktion, sondern eine Folge des physikalischen Funktionsprinzips.
Entscheidend für ruhige Bewegungen sind eine saubere Stromregelung, passende Versorgungsspannung, stabile Mechanik und eine abgestimmte Systemauslegung.
MICROSTEP entwickelt kundenspezifische Schrittmotoren, Linearaktuatoren und integrierte Antriebssysteme für präzise Bewegungsaufgaben.