

Resonanzfrequenz bei Schrittmotoren verstehen
Warum Resonanzen entstehen und wie Entwickler sie kontrollieren können
Die Resonanzfrequenz eines Schrittmotors, häufig mit
bezeichnet, ist ein zentraler Faktor für das dynamische Verhalten eines Antriebssystems. Sie beschreibt den Frequenzbereich, in dem mechanische Schwingungen im Motor-Last-System verstärkt auftreten können. In diesem Bereich reagieren Schrittmotoren besonders empfindlich auf die diskrete Schrittbewegung, die durch die elektrische Ansteuerung entsteht.
Resonanzen gehören zu den häufigsten Ursachen für Probleme bei Schrittmotoranwendungen. Entwickler beobachten in der Praxis häufig, dass ein Motor in bestimmten Drehzahlbereichen plötzlich unruhig läuft, deutlich hörbare Geräusche erzeugt oder sogar Schritte verliert. Diese Effekte treten meist nicht zufällig auf, sondern liegen in der physikalischen Struktur des Motors und der angeschlossenen Mechanik begründet.
Ein fundiertes Verständnis der Resonanzfrequenz ist daher entscheidend, um Schrittmotoren stabil und zuverlässig in Maschinen, Dosiersystemen, Laborgeräten oder automatisierten Anlagen zu betreiben.
Warum Schrittmotoren zu Resonanzen neigen
Schrittmotoren unterscheiden sich von vielen anderen Elektromotoren dadurch, dass ihre Bewegung nicht kontinuierlich erfolgt. Stattdessen wird der Rotor durch einzelne magnetische Schritte von einer stabilen Position zur nächsten bewegt. Jeder Schritt erzeugt eine kleine mechanische Anregung im System.
Diese diskrete Bewegung wirkt wie eine periodische Kraft auf das mechanische System aus Rotor, Welle und angeschlossener Last. Wenn die Frequenz dieser Anregung mit der Eigenfrequenz des Systems übereinstimmt, kann sich die Schwingung verstärken. Genau dieser Effekt wird als Resonanz bezeichnet.
In Resonanzbereichen kann es zu folgenden typischen Symptomen kommen:
• deutlich hörbare Motorgeräusche
• starke Vibrationen der Mechanik
• unruhiger Motorlauf
• reduzierte Drehmomentreserve
• Schrittverluste
Diese Effekte treten häufig in bestimmten Drehzahlbereichen auf, während der Motor außerhalb dieser Bereiche völlig stabil arbeitet.
Einflussfaktoren auf die Resonanzfrequenz
Die Resonanzfrequenz eines Schrittmotors hängt sowohl von mechanischen als auch von elektrischen Eigenschaften des Systems ab. Besonders entscheidend ist, dass Resonanz immer ein Systemphänomen ist. Sie entsteht also nicht nur im Motor selbst, sondern durch das Zusammenspiel aus Motor, Last und Ansteuerung.
Mechanische Faktoren
Mehrere mechanische Eigenschaften bestimmen maßgeblich das Resonanzverhalten:
Trägheitsmoment des Rotors
Die Masseverteilung im Rotor beeinflusst, wie stark er auf periodische Anregungen reagiert.
Lastträgheit
Die angeschlossene Mechanik, beispielsweise Spindeln, Kupplungen oder Getriebe, erhöht das Gesamtträgheitsmoment des Systems.
Steifigkeit der Mechanik
Elastische Elemente wie Kupplungen oder lange Wellen können Schwingungen zusätzlich verstärken.
Dämpfung im System
Reibung oder zusätzliche Dämpfungselemente können Resonanzen reduzieren.
Je größer das Verhältnis zwischen Motorträgheit und Lastträgheit ist, desto stärker kann das Resonanzverhalten ausgeprägt sein.
Elektrische Faktoren
Neben der Mechanik beeinflusst auch die elektrische Ansteuerung das Resonanzverhalten eines Schrittmotors.
Stromform der Ansteuerung
Bei klassischer Vollschrittansteuerung entstehen sehr impulsartige Drehmomentsprünge. Diese regen mechanische Schwingungen stärker an.
Mikroschrittbetrieb
Beim Microstepping wird der Strom in den Motorwicklungen sinusförmig moduliert. Dadurch wird das Drehmoment deutlich gleichmäßiger erzeugt und Resonanzen werden reduziert.
Versorgungsspannung und Stromregelung
Eine stabile Stromregelung sorgt für gleichmäßige Drehmomente und reduziert dadurch mechanische Schwingungen.
Berechnung der Resonanzfrequenz
Die Resonanzfrequenz eines Schrittmotors lässt sich näherungsweise aus dem Verhältnis zwischen Motorhaltemoment und Trägheitsmoment des Systems bestimmen.
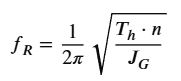
Dabei gilt:
= Resonanzfrequenz
= Haltemoment des Motors
= Anzahl der Polpaare des Rotors
= Gesamtträgheitsmoment aus Rotor und Last
Diese Gleichung zeigt deutlich, dass die Resonanzfrequenz stark vom Trägheitsmoment des Systems abhängt. Eine hohe Lastträgheit verschiebt die Resonanzfrequenz typischerweise in niedrigere Drehzahlbereiche.
In der Praxis wird die Resonanzfrequenz häufig experimentell ermittelt, da reale Systeme zusätzliche elastische Effekte enthalten können.
Strategien zur Kontrolle der Resonanzfrequenz
Da Resonanzen ein grundlegendes physikalisches Phänomen sind, lassen sie sich nicht vollständig vermeiden. Entwickler können jedoch verschiedene Maßnahmen ergreifen, um ihre Auswirkungen zu reduzieren.
Mechanische Maßnahmen
Eine Möglichkeit besteht darin, das mechanische System gezielt anzupassen.
Typische Maßnahmen sind:
• Erhöhung der Systemdämpfung
• Verwendung elastischer Kupplungen
• Anpassung der Lastträgheit
• Veränderung der mechanischen Steifigkeit
Solche Maßnahmen können die Eigenfrequenz des Systems verschieben oder Schwingungen stärker dämpfen.
Elektrische Maßnahmen
Auch die Motorsteuerung bietet wirksame Möglichkeiten zur Reduzierung von Resonanzen.
Besonders wichtig sind:
Microstepping
Durch eine feinere Stromregelung werden Drehmomentsprünge reduziert.
Optimierte Beschleunigungsrampen
Eine kontrollierte Beschleunigung verhindert, dass der Motor längere Zeit im Resonanzbereich arbeitet.
Anpassung der Stromregelung
Moderne Motortreiber können das Drehmomentverhalten gezielt beeinflussen.
Rolle moderner Motorsteuerungen
Moderne Schrittmotorsteuerungen spielen eine entscheidende Rolle bei der Kontrolle von Resonanzen. Sie ermöglichen nicht nur eine präzise Stromregelung, sondern auch komplexe Bewegungsprofile mit optimierten Beschleunigungs- und Bremsrampen.
Die SmartStep Steuerungen der MICROSTEP GmbH sind beispielsweise darauf ausgelegt, Schrittmotoren stabil und vibrationsarm zu betreiben. Durch fein abgestimmte Stromregelungen und flexible Bewegungsprofile lassen sich Resonanzeffekte deutlich reduzieren.
Gerade bei kundenspezifischen Antriebssystemen ist die Abstimmung von Motor, Mechanik und Steuerung entscheidend für einen ruhigen und zuverlässigen Betrieb.
Fazit
Die Resonanzfrequenz ist ein zentraler Faktor für das dynamische Verhalten von Schrittmotoren. Sie entsteht durch das Zusammenspiel von Motorträgheit, Lastträgheit, mechanischer Steifigkeit und elektrischer Ansteuerung.
Wenn die Schrittfrequenz eines Motors mit der Eigenfrequenz des Systems übereinstimmt, können sich Schwingungen verstärken und zu unerwünschten Effekten wie Vibrationen, Geräuschen oder Schrittverlusten führen.
Durch ein fundiertes Verständnis der Resonanzmechanismen sowie durch geeignete mechanische und elektrische Maßnahmen lassen sich diese Effekte jedoch gezielt reduzieren. Entwickler, die Resonanzverhalten frühzeitig in der Systemauslegung berücksichtigen, können Schrittmotoren stabil, präzise und effizient in unterschiedlichsten Anwendungen einsetzen.