

Resonanzfrequenz: Einfluss und Kontrolle der Bewegung
Die Resonanzfrequenz, häufig als f0 abgekürzt, ist ein kritischer Faktor bei der Funktionsweise von Schrittmotoren. Dieser Fachbeitrag beleuchtet die Bedeutung der Resonanzfrequenz, ihre Einflussfaktoren und Möglichkeiten, unerwünschte Effekte zu minimieren.
Bewegung und Resonanz: Herausforderungen bei Schrittmotoren Schrittmotoren werden eingesetzt, um definierte Bewegungspfade durch eine vorher festgelegte Anzahl von Schritten zu realisieren. In diesem Prozess kann es jedoch zu störenden Bewegungsmustern, Schrittverlusten und ungewollten Geräuschen kommen. Diese Unregelmäßigkeiten sind oft auf die Resonanzfrequenz des Motors zurückzuführen.
Einflussfaktoren auf die Resonanzfrequenz:
Mechanische und elektrische Faktoren beeinflussen die Resonanzfrequenz eines Schrittmotors:
Mechanische Faktoren: Die Anzahl der Polpaare am Rotorumfang, das Trägheitsmoment der Rotorwelle und der angebrachten Mechaniken sowie mögliche Dämpfungselemente spielen eine entscheidende Rolle. Diese Faktoren bestimmen, wie stark sich die schrittweise Bewegung auf das Gesamtsystem auswirkt.
Elektrische Faktoren: Die Art der Stromeinspeisung in die Motorwicklungen beeinflusst ebenfalls die Resonanzfrequenz. Die Wahl der Stromform, sei es impulsförmig oder weniger impulsförmig (wie bei Mikroschrittansteuerungen), wirkt sich auf das Verhalten des Motors aus.
Berechnung der Resonanzfrequenz:
Die Resonanzfrequenz f0 ist abhängig von verschiedenen Parametern, darunter das Motorhaltemoment (MH), die Rotationsträgheit (JRG) und die Anzahl der Polpaare (pZ) am Rotorumfang. Die Formel zur Berechnung der Resonanzfrequenz lautet: 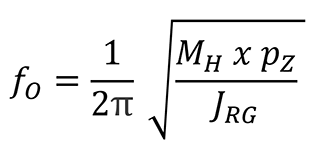
Hierbei ist JRG das Gesamtträgheitsmoment aus Rotor- und Lastträgheit.
Kontrolle der Resonanzfrequenz:
Um unerwünschte Effekte der Resonanzfrequenz zu minimieren, können verschiedene Ansätze verfolgt werden:
- Mechanische Anpassungen: Durch gezielte Gestaltung der Mechanik und Integration von Dämpfungselementen kann das Resonanzverhalten optimiert werden.
- Elektrische Steuerung: Eine weniger impulsförmige Stromeinspeisung, wie sie bei Mikroschrittansteuerungen zum Einsatz kommt, verringert das negative Resonanzverhalten.
- Höhere Induktivitäten: Konstruktiv höhere Induktivitäten in der Motorwicklung können die Resonanzdämpfung fördern.
Schlussfolgerung:
Die Resonanzfrequenz ist ein kritischer Aspekt bei der Nutzung von Schrittmotoren. Sie kann unerwünschte Bewegungsmuster und Geräusche verursachen. Verständnis der Resonanzfaktoren und Kontrollstrategien sind entscheidend, um die Performance von Schrittmotoren zu optimieren und reibungslose Bewegungen zu gewährleisten. Indem wir die Resonanzfrequenz verstehen und gezielt darauf eingehen, können wir die Effizienz und Präzision von Schrittmotoren in vielfältigen Anwendungen maximieren.