Wie funktioniert ein Schrittmotor?
Aufbau, Funktionsprinzip, Steuerung und typische Anwendungen technisch erklärt
Ein Schrittmotor ist ein elektromagnetischer Synchronmotor, der Bewegungen in diskrete Winkelschritte unterteilt. Anders als bei klassischen Gleichstrommotoren entsteht die Drehbewegung nicht durch eine kontinuierliche Spannung, sondern durch eine definierte Folge magnetischer Zustände. Die Wicklungen des Motors werden sequenziell bestromt. Dadurch entsteht ein rotierendes Magnetfeld, dem der Rotor synchron folgt. Die Drehbewegung entsteht aus einer Folge stabiler magnetischer Gleichgewichtslagen.
Ein Schrittmotor dreht sich also nicht kontinuierlich. Er folgt einem wandernden Magnetfeld. Jede Änderung der Wicklungsbestromung verschiebt dieses Magnetfeld. Der Rotor bewegt sich in die nächste stabile Lage. Genau dieses Prinzip macht Schrittmotoren präzise und reproduzierbar. Gleichzeitig erklärt es, warum jeder Schrittmotor eine Schrittmotoren Steuerung benötigt. Erst die Stepper control erzeugt die Phasenströme, berechnet die Bewegung und sorgt für Synchronität.
Bei MICROSTEP betrachten wir Schrittmotoren immer als System. Motor, Steuerung und Software sind aufeinander abgestimmt. Unsere SmartStep Schrittmotoren Steuerungen übernehmen Stromregelung, Mikroschrittbetrieb, Rampenberechnung und Ablaufsteuerung. In Verbindung mit der grafischen PSC2 Software entstehen vollständig programmierbare Antriebssysteme. Weitere Details zur grafischen Programmierung finden Sie in unserem Beitrag zur SmartStep Software:
https://microstep-motoren.de/smartstep-software
Aufbau eines Schrittmotors
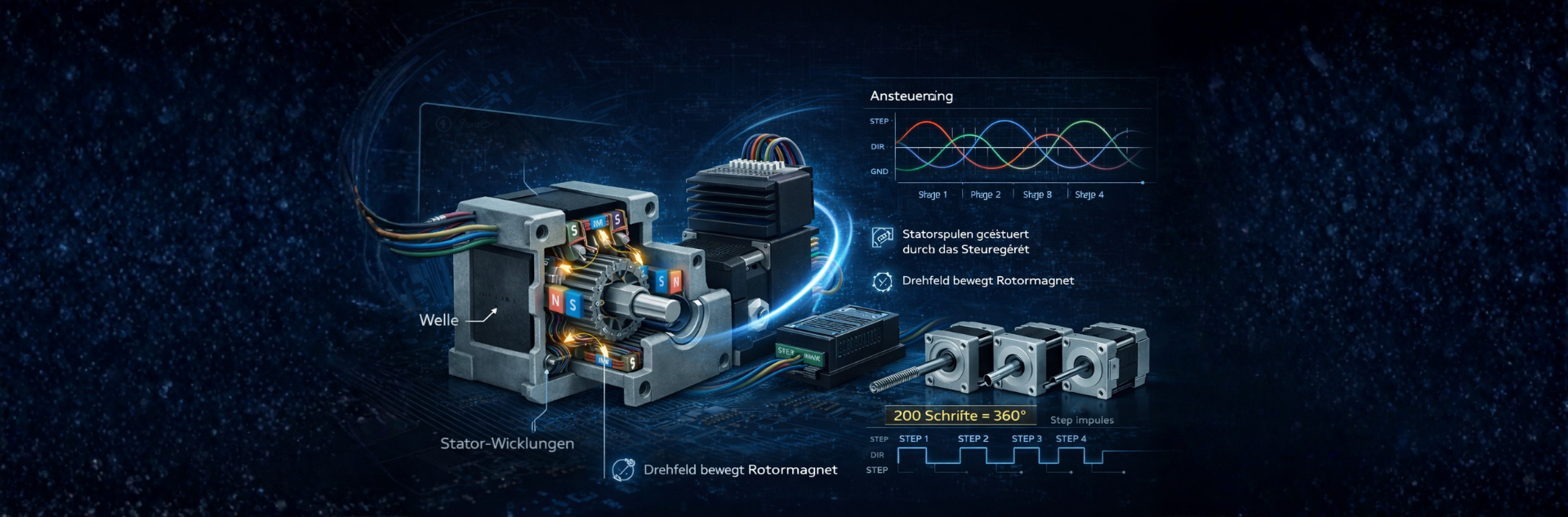
Ein Schrittmotor besteht aus einem Stator mit Wicklungen und einem Rotor mit magnetischer Struktur. Beim weit verbreiteten Hybrid Schrittmotor besteht der Rotor aus einem Permanentmagneten und einer fein verzahnten Polstruktur. Diese Zahnstruktur sorgt dafür, dass viele stabile magnetische Positionen entstehen.
Der Stator enthält mehrere Pole mit Wicklungen. Diese Wicklungen sind typischerweise in zwei Phasen aufgeteilt. Diese werden als Phase A und Phase B bezeichnet. Die Phasen sind räumlich um 90 Grad versetzt. Dadurch können zwei orthogonale Magnetfelder erzeugt werden.
Durch die Überlagerung dieser beiden Felder entsteht ein rotierendes Magnetfeld. Dieses Feld bestimmt die Position des Rotors.
Eine ausführliche Beschreibung der Zusammenhänge zwischen Schrittauflösung und Ansteuerung finden Sie auch im Artikel zur Auswahl der richtigen Schrittauflösung:
https://microstep-motoren.de/fachbeitraege/wie-man-die-richtige-schrittaufloesung-bei-schrittmotoren-auswaehlt
Elektromagnetisches Funktionsprinzip
Das Funktionsprinzip eines Schrittmotors basiert auf zwei Magnetfeldern. Wird Phase A bestromt, richtet sich der Rotor entlang dieser Phase aus. Wird Phase B bestromt, verschiebt sich das Magnetfeld. Der Rotor folgt dieser Verschiebung.
Die Steuerung erzeugt eine definierte Phasenfolge. Dadurch entsteht eine Drehbewegung. Je schneller die Zustände wechseln, desto höher ist die Drehzahl. Wird die Reihenfolge umgedreht, ändert sich die Drehrichtung.
Der Schrittmotor bewegt sich also von Magnetfeld zu Magnetfeld. Diese Bewegung ist diskret und synchron.
Wie diese Bewegung von der Steuerung erzeugt wird, wird detailliert im Beitrag zur Schrittmotoren Steuerung erklärt:
https://microstep-motoren.de/fachbeitraege/schrittmotor-steuerung-unterschiede-zwischen-dumm-und-intelligent
Mikroschrittbetrieb und sinusförmige Stromregelung
Moderne Schrittmotoren Steuerungen erzeugen keine harten Umschaltungen zwischen den Phasen. Stattdessen werden die Phasenströme kontinuierlich verändert. Typischerweise werden sinusförmige Stromverläufe erzeugt.
Ia = Imax · sin(α)
Ib = Imax · cos(α)
Durch diese kontinuierliche Änderung entsteht ein rotierendes Magnetfeld. Der Rotor folgt diesem Feld. Dadurch entstehen Mikroschritte zwischen den Vollschritten. Die Bewegung wird ruhiger und Resonanzen werden reduziert.
Weitere Details zum Mikroschrittbetrieb finden Sie in unserem Fachartikel:
https://microstep-motoren.de/fachbeitraege/microstepping-beim-schrittmotor-erklaert
Unsere SmartStep Schrittmotoren Steuerungen erzeugen diese Stromverläufe automatisch und sorgen für stabile Bewegungen.
Drehmoment und Drehzahlverhalten
Das Drehmoment entsteht durch den Winkel zwischen Rotorposition und Magnetfeld. Der Rotor versucht sich entlang des Magnetfelds auszurichten. Je größer dieser Winkel, desto größer das Drehmoment.
Das maximale Drehmoment steht im Stillstand zur Verfügung. Mit steigender Drehzahl sinkt das verfügbare Drehmoment. Ursache ist die Induktivität der Wicklungen. Der Strom kann bei schnellen Schrittwechseln nicht mehr vollständig aufgebaut werden.
Die Schrittmotorsteuerung beeinflusst dieses Verhalten erheblich. Eine höhere Versorgungsspannung verbessert die Dynamik. Die Stromregelung sorgt gleichzeitig für eine stabile thermische Belastung.
Eine ausführliche Erklärung des Zusammenhangs zwischen Induktivität und Dynamik finden Sie hier:
https://microstep-motoren.de/fachbeitraege/warum-die-induktivitaet-eines-schrittmotors-seine-dynamik-begrenzt
Beispiel aus der Praxis: Ventilsteuerung mit Schrittmotor
Ein typisches Beispiel ist eine Ventilverstellung. Der Schrittmotor bewegt eine Spindel. Diese Spindel verstellt die Ventilöffnung. Angenommen ein Motor besitzt 200 Schritte pro Umdrehung. Die Spindel erzeugt pro Umdrehung einen Weg von 1 mm. Jeder Schritt entspricht dann 0,005 mm.
Die Steuerung kann nun eine definierte Position anfahren. Beispielsweise 100 Schritte entsprechen 0,5 mm Ventilöffnung. Dadurch lässt sich der Durchfluss reproduzierbar einstellen. Der Schrittmotor bleibt in dieser Position stehen und hält das Ventil.
Durch Mikroschrittbetrieb kann die Bewegung zusätzlich verfeinert werden. Die Steuerung speichert die Position und fährt diese reproduzierbar an.
Typische Anwendungen von Schrittmotoren
Schrittmotoren werden überall dort eingesetzt, wo präzise Bewegungen erforderlich sind, ohne dass ein komplexer Regelkreis notwendig ist. Besonders in der Ventiltechnik werden Schrittmotoren eingesetzt, um Durchflussmengen exakt einzustellen. Die Position wird über die Schrittzahl definiert. Dadurch lassen sich reproduzierbare Ventilstellungen realisieren. Der Motor hält diese Position ohne zusätzliche Mechanik.
In Dosiersystemen ermöglicht der Schrittmotor eine definierte Volumensteuerung. Durch die Kombination mit Spindeln oder Pumpen entsteht eine reproduzierbare Dosierbewegung. Besonders in Laborgeräten und Analysegeräten ist diese Eigenschaft entscheidend. Die Schrittbewegung erlaubt eine sehr präzise Steuerung von Flüssigkeiten oder Gasen.
In der Automatisierungstechnik werden Schrittmotoren häufig für Positionieraufgaben eingesetzt. Formatverstellungen, Klappenverstellungen oder kleine Linearachsen sind typische Beispiele. Die Bewegungslogik kann direkt in der Steuerung gespeichert werden. Dadurch reduziert sich der Integrationsaufwand.
Auch in der Fluidtechnik werden Schrittmotoren verwendet. Mischsysteme oder Durchflussregler lassen sich exakt einstellen. Der Motor positioniert das Stellglied reproduzierbar. Gleichzeitig hält er die Position.
Weitere Beispiele zur Integration von Schrittmotoren finden Sie hier:
https://microstep-motoren.de/fachbeitraege/integration-von-schrittmotoren-in-maschinen
Schrittmotor vs Servomotor
Schrittmotoren werden häufig mit Servomotoren verglichen. Beide Technologien ermöglichen präzise Bewegungen. Der Schrittmotor arbeitet jedoch synchron ohne Encoder. Die Position ergibt sich aus der Schrittzahl. Dadurch ist die Systemarchitektur einfacher.
Servomotoren arbeiten mit Rückführung. Sie benötigen Encoder und Regelung. Dadurch wird die Komplexität höher. Schrittmotoren sind besonders geeignet für kompakte Systeme mit moderater Dynamik und hoher Positioniergenauigkeit.
Eine ausführliche Gegenüberstellung finden Sie hier:
https://microstep-motoren.de/fachbeitraege/schrittmotor-oder-servomotor-welcher-ist-besser
Schrittmotor mit integrierter Steuerung
Ein moderner Schrittmotor besteht aus Motor, Steuerung und Software. Die Steuerung erzeugt das Magnetfeld. Der Motor folgt diesem Feld. Die Software definiert den Bewegungsablauf.
Unsere SmartStep Schrittmotoren Steuerungen kombinieren:
Stepper control
Stromregelung
Mikroschrittbetrieb
Rampensteuerung
Ablaufsteuerung
In Verbindung mit unserer PSC2 Software können Bewegungsabläufe grafisch programmiert werden. Die Steuerung führt diese Abläufe eigenständig aus. Eine SPS ist in vielen Anwendungen nicht notwendig.
Weitere Informationen zur SmartStep Steuerung finden Sie hier:
https://microstep-motoren.de/smartstep-software
Fazit
Ein Schrittmotor funktioniert durch ein rotierendes Magnetfeld, das durch die Bestromung der Wicklungen entsteht. Der Rotor folgt diesem Feld Schritt für Schritt. Die Bewegung entsteht aus diskreten magnetischen Positionen.
Die Schrittmotoren Steuerung erzeugt diese Magnetfelder. Sie berechnet Mikroschritte, regelt den Strom und erzeugt Beschleunigungsrampen. Erst die Stepper control macht den Schrittmotor zu einem präzisen Antrieb.
Schrittmotoren werden in Ventiltechnik, Dosiersystemen, Automatisierung, Fluidtechnik und Laborgeräten eingesetzt. Die präzise Positionierung und einfache Integration machen sie besonders attraktiv.
Bei MICROSTEP kombinieren wir Motor, Steuerung und Software zu einem abgestimmten System. Unsere SmartStep Schrittmotoren Steuerungen ermöglichen grafische Programmierung, präzise Bewegung und einfache Integration. Dadurch wird aus einem Schrittmotor ein intelligentes Antriebssystem.