

Schrittfrequenz bei Schrittmotoren verstehen
Wie die Schrittfrequenz Drehzahl, Drehmoment und Dynamik eines Antriebs bestimmt
Die Schrittfrequenz eines Schrittmotors, häufig mit
bezeichnet und in Hertz (Hz) angegeben, ist eine der wichtigsten Steuergrößen in der Antriebstechnik. Sie beschreibt, wie viele elektrische Schrittimpulse pro Sekunde an einen Schrittmotor gesendet werden. Jeder dieser Impulse bewirkt eine definierte Änderung der Rotorposition. Die Schrittfrequenz bestimmt damit direkt, wie schnell sich ein Motor bewegt und wie dynamisch ein Antriebssystem arbeiten kann.
Schrittmotoren unterscheiden sich von vielen anderen Elektromotoren dadurch, dass ihre Bewegung nicht kontinuierlich erfolgt. Stattdessen bewegt sich der Rotor von einer stabilen magnetischen Position zur nächsten. Diese Positionen werden durch das elektromagnetische Feld der Motorwicklungen bestimmt. Jedes Umschalten der Bestromung führt zu einer neuen Gleichgewichtslage des Rotors. Die Schrittfrequenz beschreibt somit die Geschwindigkeit, mit der diese Umschaltungen stattfinden.
Für Entwickler in Maschinenbau, Automatisierung oder Medizintechnik ist die Schrittfrequenz ein zentraler Parameter bei der Auslegung eines Antriebssystems. Sie beeinflusst nicht nur die Drehzahl des Motors, sondern auch wichtige Eigenschaften wie Laufruhe, Drehmoment und Stabilität des gesamten Systems.
Zusammenhang zwischen Schrittfrequenz und Drehzahl
Ein Schrittmotor besitzt einen konstruktiv festgelegten Schrittwinkel. Dieser Schrittwinkel beschreibt, um welchen Winkel sich der Rotor bei jedem elektrischen Schritt bewegt. Bei klassischen Hybrid-Schrittmotoren beträgt dieser Winkel häufig 1,8 Grad, was einer Auflösung von 200 Schritten pro Umdrehung entspricht. Es existieren jedoch auch Motoren mit höheren Auflösungen, beispielsweise mit einem Schrittwinkel von 0,9 Grad, die entsprechend 400 Schritte pro Umdrehung benötigen.
Aus der Schrittfrequenz lässt sich direkt die Drehzahl des Motors berechnen. Je höher die Frequenz der Steuerimpulse ist, desto schneller folgt der Rotor dem rotierenden Magnetfeld.
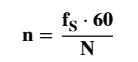
Dabei beschreibt
die Drehzahl des Motors in Umdrehungen pro Minute,
die Schrittfrequenz in Hertz und
die Anzahl der Schritte pro Umdrehung.
Ein Beispiel verdeutlicht diesen Zusammenhang. Wird ein Motor mit 200 Schritten pro Umdrehung mit einer Schrittfrequenz von 1000 Hz angesteuert, ergibt sich eine Drehzahl von 300 Umdrehungen pro Minute. Wird die Frequenz verdoppelt, verdoppelt sich auch die Drehzahl des Motors.
In der Praxis wird die Schrittfrequenz jedoch nicht beliebig erhöht, da verschiedene physikalische Effekte die maximale Drehzahl eines Schrittmotors begrenzen.
Einfluss der Schrittfrequenz auf das Drehmoment
Eine wichtige Eigenschaft von Schrittmotoren ist der charakteristische Zusammenhang zwischen Drehmoment und Drehzahl. Während ein Motor im Stillstand sein maximales Haltemoment bereitstellen kann, nimmt das verfügbare Drehmoment mit steigender Drehzahl kontinuierlich ab.
Der Grund dafür liegt hauptsächlich in der elektrischen Induktivität der Motorwicklungen. Wird eine Spannung an eine Motorwicklung angelegt, steigt der Strom nicht sofort auf seinen maximalen Wert an. Stattdessen wächst er zeitlich verzögert an. Dieser Effekt wird durch die Induktivität der Wicklung verursacht.
Bei niedrigen Schrittfrequenzen bleibt genügend Zeit, damit der Strom in der Wicklung vollständig ansteigen kann. Der Motor erreicht somit sein maximales Drehmoment. Mit steigender Schrittfrequenz wird die Zeit zwischen zwei Schritten jedoch immer kürzer. Der Strom erreicht dann nicht mehr seinen maximalen Wert, wodurch auch das erzeugte Drehmoment sinkt.
Dieser Effekt ist einer der wichtigsten Gründe dafür, warum Schrittmotoren bei hohen Drehzahlen deutlich weniger Drehmoment liefern als im Stillstand.
Einfluss der Schrittfrequenz auf Laufruhe und Resonanzen
Neben dem Drehmoment beeinflusst die Schrittfrequenz auch das Vibrationsverhalten eines Schrittmotors. Da der Motor in diskreten Schritten arbeitet, entstehen bei jeder Schrittbewegung kleine Drehmomentimpulse. Diese Impulse können das mechanische System aus Motor, Welle und angeschlossener Last zu Schwingungen anregen.
Wenn die Schrittfrequenz in die Nähe der Eigenfrequenz des mechanischen Systems kommt, können sich diese Schwingungen verstärken. In diesem Fall spricht man von einer Resonanz. Resonanzen äußern sich häufig durch hörbare Geräusche, spürbare Vibrationen oder einen unruhigen Motorlauf.
Besonders bei niedrigen und mittleren Drehzahlen treten solche Resonanzbereiche häufig auf. Entwickler versuchen daher, diese Bereiche möglichst schnell zu durchfahren oder durch geeignete Steuerstrategien zu vermeiden.
Der Mikroschrittbetrieb moderner Motortreiber kann hier deutlich helfen, da er die Drehmomentimpulse reduziert und somit das Resonanzverhalten verbessert.
Schrittfrequenz und Betriebsarten des Schrittmotors
Die Bedeutung der Schrittfrequenz hängt auch stark von der gewählten Betriebsart des Motors ab. Schrittmotoren können im Vollschrittbetrieb, im Halbschrittbetrieb oder im Mikroschrittbetrieb betrieben werden. Diese Betriebsarten bestimmen, wie viele elektrische Schritte für eine vollständige mechanische Umdrehung erforderlich sind.
Im Vollschrittbetrieb entspricht jeder elektrische Steuerimpuls einem vollständigen mechanischen Schritt des Motors. Die Schrittfrequenz ist daher identisch mit der Frequenz der mechanischen Schrittbewegung.
Im Halbschrittbetrieb wird jeder Vollschritt in zwei kleinere Schritte unterteilt. Dadurch verdoppelt sich die Anzahl der Schritte pro Umdrehung. Um die gleiche mechanische Drehzahl zu erreichen, muss daher auch die Schrittfrequenz entsprechend erhöht werden.
Im Mikroschrittbetrieb wird der Vollschritt in viele kleinere Schritte unterteilt. Moderne Motortreiber ermöglichen beispielsweise 8, 16 oder sogar 32 Mikroschritte pro Vollschritt. Dadurch steigt die Anzahl der Schritte pro Umdrehung erheblich. Um die gleiche Drehzahl zu erreichen, muss die Steuerung entsprechend höhere Schrittfrequenzen erzeugen.
Der Vorteil dieser Betriebsart liegt in einer deutlich ruhigeren Bewegung und einer feineren Positionsauflösung.
Bedeutung der Schrittfrequenz für die Systemauslegung
Bei der Auslegung eines Schrittmotorantriebs müssen Entwickler mehrere Faktoren berücksichtigen, die direkt mit der Schrittfrequenz zusammenhängen. Dazu gehören unter anderem die gewünschte Drehzahl, die mechanische Trägheit der Last und das verfügbare Drehmoment des Motors.
Ein häufiger Fehler besteht darin, die maximal mögliche Schrittfrequenz allein anhand der Steuerungselektronik zu betrachten. In der Praxis wird die erreichbare Frequenz jedoch fast immer durch das verfügbare Drehmoment des Motors begrenzt. Wenn die Schrittfrequenz zu schnell erhöht wird, kann der Rotor dem rotierenden Magnetfeld nicht mehr folgen. In diesem Fall verliert der Motor Schritte und arbeitet nicht mehr synchron.
Aus diesem Grund verwenden moderne Steuerungen Beschleunigungsrampen. Dabei wird die Schrittfrequenz beim Start eines Motors langsam erhöht, sodass der Rotor ausreichend Zeit hat, sich an die steigende Drehzahl anzupassen.
Rolle moderner Motorsteuerungen
Die Schrittfrequenz wird in der Praxis von der Motorsteuerung erzeugt. Moderne Motortreiber berechnen kontinuierlich die benötigten Schrittimpulse und passen sie an das gewünschte Bewegungsprofil an. Dabei können verschiedene Funktionen integriert sein, beispielsweise Beschleunigungsrampen, Bremsprofile oder Mikroschrittsteuerungen.
Die SmartStep Steuerungen der MICROSTEP GmbH ermöglichen beispielsweise eine präzise Anpassung der Schrittfrequenz an die Anforderungen einer Anwendung. Durch optimierte Stromregelungen und flexible Bewegungsprofile lassen sich sowohl dynamische Bewegungen als auch sehr ruhige Positionierungen realisieren.
Gerade bei kundenspezifischen Schrittmotorlösungen ist die Abstimmung von Motor, Treiber und Steuerstrategie entscheidend, um ein stabiles und effizientes Antriebssystem zu erhalten.
Fazit
Die Schrittfrequenz ist eine zentrale Steuergröße bei Schrittmotoren. Sie bestimmt direkt die Drehzahl des Motors und beeinflusst gleichzeitig wichtige Eigenschaften wie Drehmoment, Laufruhe und Dynamik.
Mit steigender Schrittfrequenz erhöht sich zwar die Geschwindigkeit des Motors, gleichzeitig sinkt jedoch das verfügbare Drehmoment. Entwickler müssen daher immer einen Kompromiss zwischen Geschwindigkeit, Stabilität und Leistungsfähigkeit finden.
Durch moderne Motorsteuerungen und optimierte Bewegungsprofile lässt sich die Schrittfrequenz jedoch präzise an die Anforderungen einer Anwendung anpassen. Dadurch können Schrittmotoren in vielen industriellen Anwendungen zuverlässig und effizient eingesetzt werden.