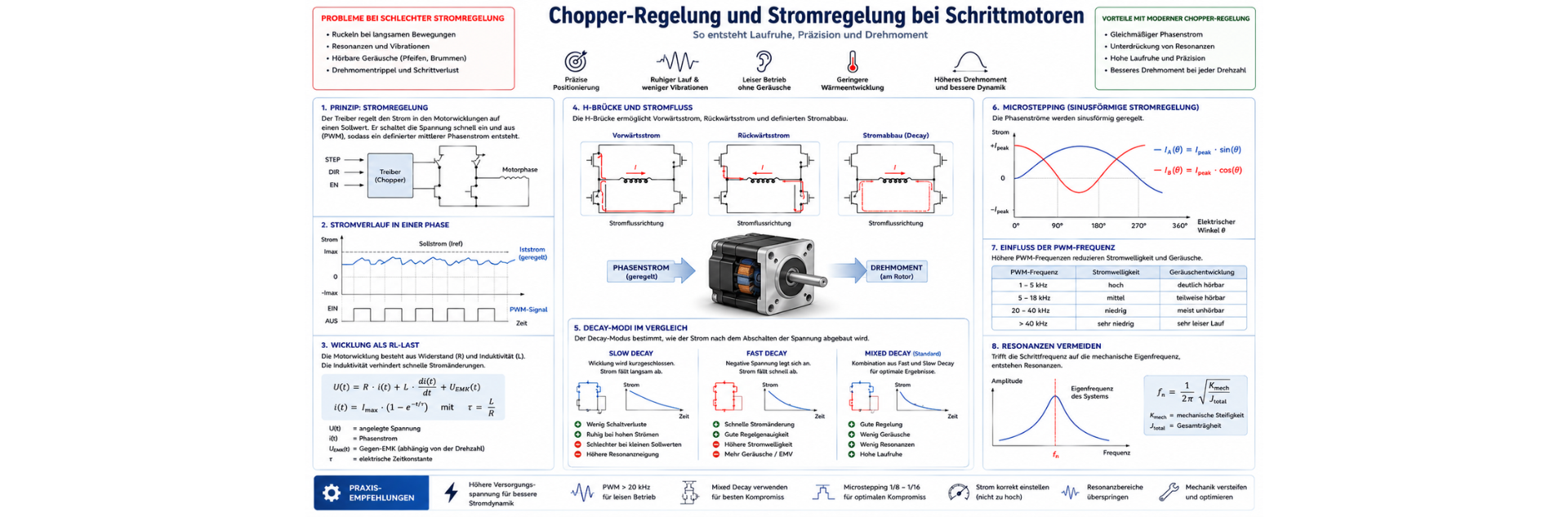
Chopper-Regelung und Stromregelung bei Schrittmotoren
Warum Schrittmotoren ruckeln, Resonanzen erzeugen oder Geräusche entwickeln und wie moderne Treiber mit sauberer Stromregelung, Mixed Decay und hoher PWM-Frequenz die Laufruhe deutlich verbessern.
Warum die Stromregelung bei Schrittmotoren entscheidend ist
Schrittmotoren gelten als präzise, robuste und vergleichsweise einfach steuerbare Antriebe. In der Praxis zeigt sich jedoch häufig ein anderes Bild. Viele Anwendungen laufen bei höheren Drehzahlen sauber, beginnen jedoch bei langsamen Bewegungen zu vibrieren, hörbare Geräusche zu erzeugen oder unruhig zu laufen. Besonders bei Linearaktuatoren auf Schrittmotorbasis, Ventilsteuerungen, Dosiersystemen oder hochauflösenden Positionieraufgaben treten Resonanzen und Ruckeln häufig genau dort auf, wo eigentlich maximale Präzision gefordert wird.
Die Ursache liegt dabei oft nicht im Motor selbst, sondern in der Stromregelung des Schrittmotor-Treibers. Ein Schrittmotor erzeugt sein Drehmoment direkt aus dem Magnetfeld seiner Wicklungen. Dieses Magnetfeld wiederum entsteht aus dem Stromfluss innerhalb der Motorphasen. Sobald der Strom nicht sauber dem Sollwert folgt, entstehen Ungleichmäßigkeiten im Magnetfeld. Der Rotor bewegt sich dann nicht mehr gleichmäßig, sondern beginnt zu schwingen, zu resonieren oder hörbar zu arbeiten.
Genau deshalb ist die Qualität der Chopper-Regelung heute einer der wichtigsten Faktoren moderner Schrittmotoren, Linearaktuatoren und integrierter Antriebssysteme. Besonders in Medizintechnik, Automatisierung, Sondermaschinenbau, Ventiltechnik, Dosiertechnik und Laborautomation entscheidet die Stromregelung direkt über Laufruhe, Geräuschentwicklung, Resonanzverhalten, Positionierqualität, Dynamik und Wärmeentwicklung.
Warum Schrittmotoren bei langsamer Bewegung ruckeln
Viele Entwickler kennen das Problem aus der Praxis. Der Motor funktioniert grundsätzlich, beginnt jedoch bei langsamen Bewegungen unruhig zu laufen. Statt einer gleichmäßigen Rotation entstehen kleine Vibrationen oder periodische Bewegungsfehler. Besonders kritisch wird das bei hochauflösenden Bewegungen, kleinen Vorschüben, Ventilstellungen oder linearen Positionieraufgaben.
Der Grund dafür liegt im physikalischen Aufbau des Schrittmotors. Ein Schrittmotor folgt einem rotierenden Magnetfeld. Dieses Magnetfeld wird durch die beiden Motorphasen erzeugt. Damit der Rotor sauber folgt, muss der Strom in beiden Wicklungen möglichst exakt geregelt werden. Bereits kleine Stromabweichungen erzeugen Drehmomentschwankungen. Diese Schwankungen regen wiederum das mechanische System an.
Die Folge sind Resonanzen, hörbares Pfeifen, Drehmomentrippel, Vibrationen und unruhige Bewegungen. Besonders kritisch wird dies im Bereich niedriger Drehzahlen, weil dort häufig die Schrittfrequenzen auf die mechanischen Eigenfrequenzen des Systems treffen. Weitere Grundlagen zur Ansteuerung von Schrittmotoren finden sich im Fachbeitrag Schrittmotoren präzise steuern: Steuerarten im Vergleich.
Die Motorwicklung als elektrische RL-Last
Elektrisch betrachtet besteht eine Motorwicklung aus einem Widerstand und einer Induktivität. Dadurch verhält sich die Wicklung wie eine klassische RL-Last. Genau diese Induktivität verhindert schnelle Stromänderungen. Die Grundgleichung einer Motorwicklung lautet:
| Symbol | Bedeutung |
|---|---|
| \(U(t)\) | Klemmenspannung der Wicklung |
| \(R\) | Wicklungswiderstand |
| \(L\) | Wicklungsinduktivität |
| \(i(t)\) | Wicklungsstrom |
| \(U_{EMK}\) | Gegen-EMK des Motors |
Die Wicklungsinduktivität sorgt dafür, dass sich der Strom nicht sprunghaft ändern kann. Stattdessen steigt er zeitverzögert an. Der Stromaufbau folgt dabei einer Exponentialfunktion:
Die elektrische Zeitkonstante ergibt sich aus:
Diese Zeitkonstante bestimmt direkt, wie schnell der Phasenstrom dem gewünschten Sollwert folgen kann. Je höher die Induktivität und je niedriger die zur Verfügung stehende Spannung, desto träger reagiert der Strom auf neue Sollwerte. Für die Bewegungsdynamik des gesamten Systems spielt zusätzlich die mechanische Zeitkonstante eine Rolle, die im Fachbeitrag mechanische Zeitkonstante näher beschrieben wird.
Warum die Versorgungsspannung wichtiger ist als die Motornennspannung
Viele Anwender orientieren sich zunächst an der Nennspannung eines Schrittmotors. Moderne Schrittmotor-Systeme arbeiten jedoch häufig mit deutlich höheren Versorgungsspannungen. Ein Motor mit einer Nennspannung von 2,8 V, 3,2 V oder 4 V wird in der Praxis oft mit 24 V, 36 V oder 48 V betrieben. Das wirkt zunächst widersprüchlich, ist jedoch für eine schnelle Stromregelung notwendig.
Die Stromanstiegsgeschwindigkeit ergibt sich aus:
Eine höhere Versorgungsspannung erhöht direkt die mögliche Stromänderungsgeschwindigkeit. Dadurch erreicht der Strom deutlich schneller seinen Sollwert. Das verbessert das Drehmoment bei höheren Drehzahlen, die Dynamik, die Beschleunigung, die Microstepping-Qualität und die Laufruhe.
Genau deshalb arbeiten moderne SmartStep Steuerungen und andere industrielle Schrittmotor-Steuerungen nahezu immer mit einer deutlich höheren Versorgungsspannung als der eigentlichen Motornennspannung. Der Strom wird dabei nicht durch den Wicklungswiderstand begrenzt, sondern aktiv durch die Chopper-Regelung des Treibers.
Die Chopper-Regelung als Herz moderner Schrittmotor-Treiber
Da die Versorgungsspannung deutlich höher als die Motornennspannung ist, muss der Strom permanent geregelt werden. Genau dafür wird die Chopper-Regelung eingesetzt. Der Treiber legt Spannung an die Wicklung an. Der Strom steigt an. Sobald der gewünschte Sollstrom erreicht wird, schaltet der Treiber die Spannung wieder ab. Sinkt der Strom erneut ab, wird wieder eingeschaltet.
Dieser Vorgang wiederholt sich permanent mit hoher Frequenz. Typische PWM-Frequenzen moderner Treiber liegen im Bereich von 20 kHz bis 40 kHz, teilweise auch darüber. Dadurch entsteht ein geregelter mittlerer Phasenstrom.
Genau diese PWM-Stromregelung bestimmt maßgeblich die Laufruhe, das Resonanzverhalten, die Geräuschentwicklung, den Wirkungsgrad und die Wärmeentwicklung des Schrittmotor-Systems. Für parametrierbare Bewegungsprofile, Rampen, Positionierabläufe und Referenzfahrten ist die Kombination aus Treiber, Software und Anwendung entscheidend. MICROSTEP beschreibt diese Verbindung auf der Seite zur SmartStep Software PSC2.
Warum schlechte Treiber Resonanzen und Geräusche erzeugen
Viele einfache oder günstige Schrittmotor-Treiber arbeiten mit niedrigen PWM-Frequenzen, einfachen Decay-Verfahren, hoher Stromwelligkeit und ungenauer Stromregelung. Die Folge ist ein unsauberes Magnetfeld innerhalb des Motors.
Dadurch entstehen Drehmomentschwankungen, Resonanzen, hörbare Geräusche, Vibrationen und schlechter Gleichlauf. Besonders kritisch wird dies bei langsamen Bewegungen, hochauflösenden Positionieraufgaben, Linearaktuatoren, Ventilsteuerungen und Dosierbewegungen. Gerade hier zeigen hochwertige Treiber oft massive Vorteile gegenüber einfachen Lösungen.
Fast Decay, Slow Decay und Mixed Decay
Ein zentraler Bestandteil moderner Chopper-Regelungen ist der sogenannte Decay-Modus. Dieser bestimmt, wie der Strom nach dem Abschalten der Versorgungsspannung wieder abgebaut wird.
Slow Decay
Beim Slow Decay wird die Wicklung kurzgeschlossen. Der Strom fällt dadurch langsam ab. Das reduziert Schaltverluste, erzeugt jedoch häufig eine schlechtere Stromform bei kleinen Sollwerten. Besonders bei Microstepping kann Slow Decay dazu führen, dass der reale Phasenstrom dem idealen Sinusverlauf nicht sauber folgt.
Fast Decay
Beim Fast Decay wird eine negative Spannung an die Wicklung angelegt. Dadurch fällt der Strom deutlich schneller ab. Das verbessert die Regelgeschwindigkeit, erzeugt jedoch häufig höhere Stromwelligkeiten und hörbare Geräusche. Fast Decay kann deshalb technisch notwendig sein, ist aber allein nicht immer die beste Lösung für maximale Laufruhe.
Mixed Decay
Moderne Treiber kombinieren beide Verfahren im sogenannten Mixed Decay. Dabei wird zunächst Fast Decay genutzt, um den Strom schnell zu reduzieren. Anschließend erfolgt Slow Decay zur Stabilisierung. Das verbessert Laufruhe, Sinusform, Resonanzverhalten, Geräuschentwicklung und Stromqualität.
Mixed Decay gehört heute zu den wichtigsten Funktionen moderner Schrittmotor-Treiber, weil es einen guten Kompromiss aus schneller Regelung und geringer Stromwelligkeit ermöglicht. Für Anwendungen, bei denen Geräusch, Wärme und Parametrierung gemeinsam betrachtet werden müssen, ist auch der Fachbeitrag Schrittmotoren und Wärme eine sinnvolle Ergänzung.
PWM-Frequenz und hörbare Geräusche
Die PWM-Frequenz beeinflusst direkt die akustischen Eigenschaften eines Schrittmotor-Systems. Liegt die Frequenz im hörbaren Bereich, entsteht das typische Pfeifen vieler Schrittmotor-Anwendungen. Deshalb arbeiten moderne Treiber meist oberhalb des Hörbereichs.
| PWM-Frequenz | Typisches Verhalten |
|---|---|
| 1 bis 5 kHz | deutlich hörbar, hohe Stromwelligkeit |
| 5 bis 18 kHz | teilweise hörbar, abhängig von Mechanik und Last |
| 20 bis 40 kHz | meist unhörbar, gute Laufruhe |
| > 40 kHz | sehr ruhiger Lauf, jedoch höhere Schaltverluste |
Die Stromwelligkeit lässt sich vereinfacht über folgende Beziehung beschreiben:
Aus dieser Gleichung wird deutlich: Eine höhere PWM-Frequenz reduziert die Stromwelligkeit. Gleichzeitig steigen jedoch die Schaltverluste im Leistungsteil. Die optimale Auslegung ist deshalb immer ein Kompromiss aus Laufruhe, Wirkungsgrad, EMV-Verhalten und thermischer Belastung.
Microstepping und sinusförmige Stromregelung
Beim Microstepping werden die beiden Phasenströme sinusförmig geregelt. Dadurch entstehen Zwischenpositionen zwischen den eigentlichen Vollschritten. Die idealen Stromformen lauten:
Durch diese sinusförmige Stromregelung verbessern sich Laufruhe, Gleichlauf, Vibrationsverhalten und Geräuschentwicklung. Allerdings wird Microstepping häufig überschätzt. Höhere Microstepping-Auflösungen erzeugen nicht automatisch eine höhere reale Positioniergenauigkeit. Einen ergänzenden Überblick zu Vollschritt, Halbschritt und Mikroschritt bietet der Fachbeitrag Schrittmotor Steuerarten im Vergleich.
Warum 1/256 Microstepping oft keinen realen Vorteil bringt
Viele moderne Treiber werben mit extrem hohen Microstepping-Auflösungen wie 1/128 oder 1/256. Theoretisch entstehen dadurch sehr kleine Schrittweiten. In der Praxis wird die tatsächliche Genauigkeit jedoch durch die Stromregelung, die Mechanik und das Rastmoment des Motors begrenzt.
Die Stromwelligkeit der Chopper-Regelung ist häufig größer als die eigentliche Stromänderung eines einzelnen Mikroschrittes. Dadurch kann der reale Strom dem theoretischen Sollwert nicht mehr exakt folgen. In vielen Anwendungen liefern 1/8, 1/16 oder teilweise 1/32 bereits den besten Kompromiss aus Laufruhe, Stabilität, echter Positionierbarkeit und Regelbarkeit.
Resonanzen bei Schrittmotoren
Jedes mechanische System besitzt Eigenfrequenzen. Trifft die Schrittfrequenz des Motors auf diese Bereiche, entstehen Resonanzen. Diese Resonanzen können sich als Vibration, Geräusch, unruhiger Lauf oder sogar Schrittverlust bemerkbar machen.
Die Eigenfrequenz ergibt sich vereinfacht aus:
Besonders kleine Schrittmotoren zeigen Resonanzen häufig genau im Bereich langsamer Bewegungen. Eine hochwertige Stromregelung reduziert diese Effekte deutlich, da das Drehmoment gleichmäßiger erzeugt wird und weniger Anregung in das mechanische System gelangt.
Besonders bei elektrischen Ventilverstellungen, Dosiersystemen oder kompakten Positionierantrieben beeinflusst die Stromregelung direkt die Laufruhe und Wiederholgenauigkeit des Systems. Der Fachbeitrag Schrittmotoren in Ventilsteuerungen zeigt, warum gerade Stellbewegungen und Ventilpositionen eine sauber abgestimmte Kombination aus Motor, Mechanik und Steuerung benötigen.
Praxisempfehlungen für ruhige Schrittmotor-Systeme
In der Praxis haben sich einige Maßnahmen als besonders wirksam erwiesen. Eine höhere Versorgungsspannung verbessert die Dynamik und die Stromregelung erheblich. PWM-Frequenzen oberhalb von 20 kHz reduzieren hörbare Geräusche deutlich. Mixed Decay sorgt meist für die beste Kombination aus Laufruhe und Regelgeschwindigkeit. Beim Microstepping liefern 1/8 oder 1/16 häufig den besten Kompromiss aus Stabilität und ruhigem Lauf.
Ebenso wichtig ist eine korrekte Parametrierung des Phasenstroms. Zu hohe Ströme erhöhen die Wärmeentwicklung und verstärken häufig Resonanzen. Zu niedrige Ströme reduzieren dagegen das verfügbare Drehmoment. Gerade bei anspruchsvollen Anwendungen entscheidet deshalb nicht nur der Motor selbst, sondern das abgestimmte Gesamtsystem aus Motor, Steuerung, Mechanik, Stromregelung und Parametrierung über die reale Bewegungsqualität.
| Maßnahme | Wirkung |
|---|---|
| Mixed Decay verwenden | Bessere Laufruhe und geringere Stromwelligkeit |
| PWM-Frequenz über 20 kHz | Weniger hörbare Geräusche |
| Höhere Versorgungsspannung | Schnellere Stromregelung und bessere Dynamik |
| 1/8 bis 1/16 Microstepping | Guter Kompromiss aus Laufruhe und Regelbarkeit |
| Phasenstrom korrekt einstellen | Weniger Wärme, weniger Resonanz, ausreichendes Drehmoment |
| Resonanzbereiche durch Rampen vermeiden | Stabilerer Lauf bei kritischen Drehzahlen |
Kundenspezifische Schrittmotor-Systeme von MICROSTEP
MICROSTEP GmbH entwickelt kundenspezifische Schrittmotor-Systeme, Linearaktuatoren und integrierte Positionierantriebe für industrielle Anwendungen. Besonders bei langsamen Bewegungen, hochauflösenden Positionieraufgaben, Ventilsteuerungen oder Dosiersystemen entscheidet die Qualität der Stromregelung über die reale Bewegungsqualität.
Mit dem SmartStep Steuerungssystem und der PSC2 Software lassen sich Bewegungsprofile, Rampen, Referenzfahrten, Positionierabläufe und Triggerfunktionen präzise parametrieren und direkt an die jeweilige Anwendung anpassen.
Die Kombination aus Schrittmotor, Steuerung, Mechanik, Stromregelung und Parametrierung ermöglicht kompakte und reproduzierbare Bewegungssysteme für Maschinenbau, Medizintechnik, Laborautomation, Ventiltechnik, Dosiertechnik und Sondermaschinenbau.
Weitere technische Grundlagen und Anwendungsbeispiele finden sich in den MICROSTEP Fachbeiträgen rund um Schrittmotoren und Motion Control.
Fazit
Die Stromregelung ist heute das eigentliche Herz moderner Schrittmotor-Systeme. Nicht der Motor allein entscheidet über Laufruhe, Resonanzverhalten, Geräuschentwicklung, Präzision und Dynamik, sondern die Fähigkeit des Treibers, den Phasenstrom sauber und schnell zu regeln.
Moderne Chopper-Regelungen mit hoher PWM-Frequenz, Mixed Decay, intelligenter Stromregelung und sauberem Microstepping verbessern die reale Bewegungsqualität erheblich. Besonders bei langsamen Bewegungen, Linearaktuatoren, Ventilsteuerungen, Dosiersystemen und präzisen Positionieraufgaben wird die Qualität der Stromregelung damit zu einem der wichtigsten Faktoren moderner Schrittmotor-Anwendungen.